About

Jacob Regenstein is a robotics engineer and pilot of both manned and unmanned aircraft.
Robotics engineer and pilot
Jacob Regenstein is a robotics engineer and pilot of both manned and unmanned aircraft.
Click here for PDF.
A vision based system to facilitate dogfighting between GA planes.
DARPA Fast Light Autonomy
A program to develop GPS-denied autonomy and obstacle avoidance. I worked on Scientific System's team. Our approach was entirely vision-based. A video with a more in-depth explaination can be found here, a video of flight footage can be found here, and the paper I co-authored on our work can be found here.
DARPA Small Autonomous Sensor Agnostic Sense and Avoid (SA3)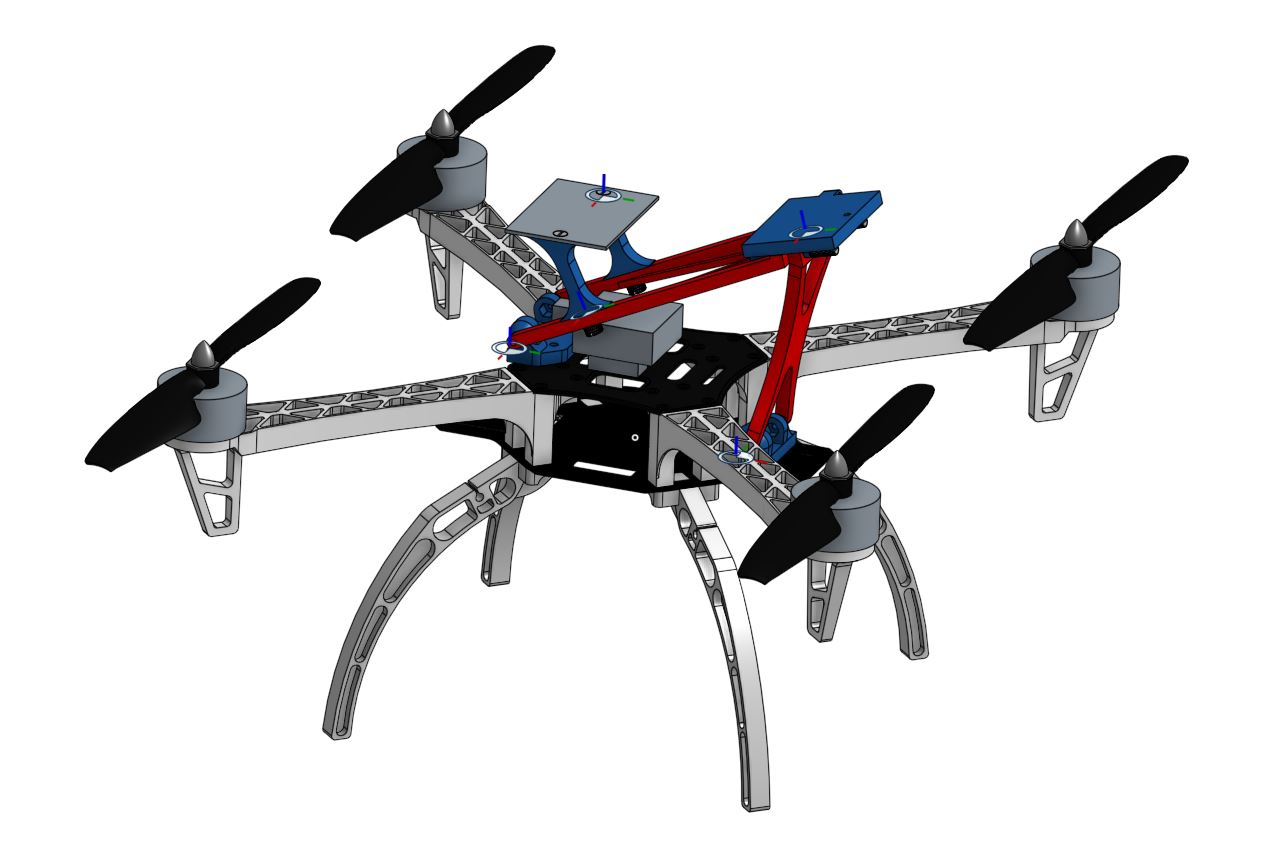
A program similar to FLA, with a similar approach. Pictured is the sensor platform I made for the program, designed to be modular, upgradable, easy to work on, 3D print quickly, allow adjustment of camera position, and allow the electronics to survive crashes. Red parts are designed to break easily, blue parts are solid. The CAD files can be viewed here.
Small Satellite Design
I led a team of Olin students in designing a small satellite to deploy radar targets. As part of an Olin class, we worked with NASA Wallops and Twiggs Space Lab to develop an experimental payload for the new thinsat form factor. The requirements for this project were to deploy several radar targets, rotating at 10 rps, to calibrate Lincoln Labs' Haystack Observatory for small radar targets.
AIAA Design Build Fly
I was a founding member of Olin College's Design Build Fly project team. For the 2018 competition I worked primarily on stability and flight testing. We placed 11th out of 101 teams (it was our first year competing). For the 2019 competition I led the aerodynamics subteam, in charge of airfoil selection, wing sizing, and payload optimization.
AV High Altitude Glider
I worked on a high altitude glider program at AeroVironment. I developed SITL tools using C++ and python. I also investigated, reproduced, and fixed in flight mechanical failures, as well as integrated long range telemetry into the avionics.
Impact Submersible
A research project to investigate the feasibility of aerially deploying a submersible without a parachute. The challenge was to make a shape that had poor aerodynamics but good hydrodynamics. I worked on this project alone, creating the launcher, vehicle, and IMU sensor payload.
DARPA Squad-X
I worked as a pilot and UAV engineer for Scientific System's Squad-X program.
Helical Dreams Sculpture
A ball track sculpture that uses local minima to roll a ball uphill. A presentation video can be found here, a sample technical drawing package can be found here, and the poster can be found here.
Robo-ray
An autonomous boat powered by wing flapping.
Coi-fish
An autonomous underwater vehicle that navigates visually.
Myocopter
A myo-wristband controlled quadcopter. The Myo collects IMU and EEG data to sense arm gestures. This project allows the user to control a quadcopter with just this wristband. Awarded best hardware hack at Codestallation 2017. I wrote the code to allow the computer to output a PPM signal through the audio jack to control the quadcopter. Github repo is here, presentation slides are here.
Robo-tumbleweed
A tensegrity robot. 3rd place fan favorite at MakeHarvard 2018.
L.H.C. Alignment System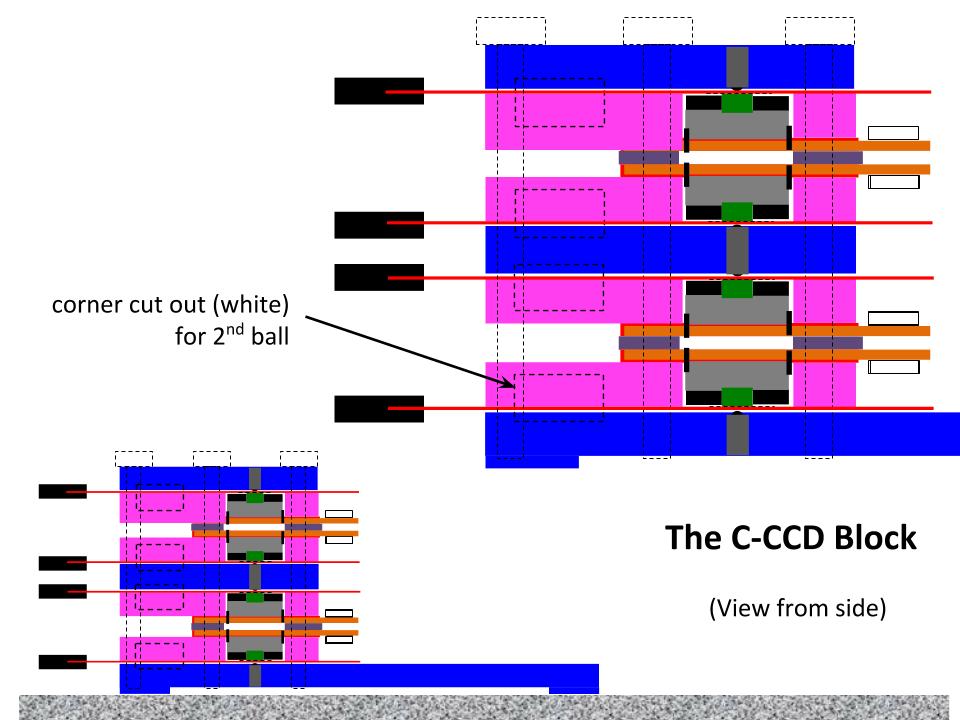
I investigated illumination methods and created calibration algorithms for the alignment system on the ATLAS detector on the Large Hadron Collider.
Campus Rover
An autonomous vehicle with lidar for obstacle avoidance and vision based navigation using april tags. The system is programmed in ROS. Above is a short video demoing waypoint navigation, github repo is here.
Printed Plane
A fixed wing aircraft made from 3D printed pieces, office supplies, and parts from a broken quadcopter. Honorable mention at Brandeis 2015 Printathon.
A program to develop GPS-denied autonomy and obstacle avoidance. I worked on Scientific System's team. Our approach was entirely vision-based. A video with a more in-depth explaination can be found here, a video of flight footage can be found here, and the paper I co-authored on our work can be found here.
Click here for full portfolio.
A program similar to FLA, with a similar approach. Pictured is the sensor platform I made for the program, designed to be modular, upgradable, easy to work on, 3D print quickly, allow adjustment of camera position, and allow the electronics to survive crashes. Red parts are designed to break easily, blue parts are solid. The CAD files can be viewed here.
Click here for full portfolio.
This is bold and this is strong. This is italic and this is emphasized.
This is superscript text and this is subscript text.
This is underlined and this is code: for (;;) { ... }. Finally, this is a link.
Fringilla nisl. Donec accumsan interdum nisi, quis tincidunt felis sagittis eget tempus euismod. Vestibulum ante ipsum primis in faucibus vestibulum. Blandit adipiscing eu felis iaculis volutpat ac adipiscing accumsan faucibus. Vestibulum ante ipsum primis in faucibus lorem ipsum dolor sit amet nullam adipiscing eu felis.
i = 0;
while (!deck.isInOrder()) {
print 'Iteration ' + i;
deck.shuffle();
i++;
}
print 'It took ' + i + ' iterations to sort the deck.';| Name | Description | Price |
|---|---|---|
| Item One | Ante turpis integer aliquet porttitor. | 29.99 |
| Item Two | Vis ac commodo adipiscing arcu aliquet. | 19.99 |
| Item Three | Morbi faucibus arcu accumsan lorem. | 29.99 |
| Item Four | Vitae integer tempus condimentum. | 19.99 |
| Item Five | Ante turpis integer aliquet porttitor. | 29.99 |
| 100.00 | ||
| Name | Description | Price |
|---|---|---|
| Item One | Ante turpis integer aliquet porttitor. | 29.99 |
| Item Two | Vis ac commodo adipiscing arcu aliquet. | 19.99 |
| Item Three | Morbi faucibus arcu accumsan lorem. | 29.99 |
| Item Four | Vitae integer tempus condimentum. | 19.99 |
| Item Five | Ante turpis integer aliquet porttitor. | 29.99 |
| 100.00 | ||
I worked as a pilot and UAV engineer for Scientific System's Squad-X program.
Click here for full portfolio.
A ball track sculpture that uses local minima to roll a ball uphill. A presentation video can be found here, a sample technical drawing package can be found here, and the poster can be found here.
Click here for full portfolio.
An autonomous boat powered by wing flapping.
Click here for full portfolio.
An autonomous underwater vehicle that navigates visually.
Click here for full portfolio.
A myo-wristband controlled quadcopter. The Myo collects IMU and EEG data to sense arm gestures. This project allows the user to control a quadcopter with just this wristband. Awarded best hardware hack at Codestallation 2017. I wrote the code to allow the computer to output a PPM signal through the audio jack to control the quadcopter. Github repo is here, presentation slides are here.
Click here for full portfolio.
A tensegrity robot. 3rd place fan favorite at MakeHarvard 2018.
Click here for full portfolio.
I investigated illumination methods and created calibration algorithms for the alignment system on the ATLAS detector on the Large Hadron Collider.
Click here for full portfolio.
An autonomous vehicle with lidar for obstacle avoidance and vision based navigation using april tags. The system is programmed in ROS. Above is a short video demoing waypoint navigation, github repo is here.
Click here for full portfolio.
A fixed wing aircraft made from 3D printed pieces, office supplies, and parts from a broken quadcopter. Honorable mention at Brandeis 2015 Printathon.
Click here for full portfolio.